Sandkasse hakon: Forskjell mellom sideversjoner
Ingen redigeringsforklaring |
|||
| (126 mellomliggende revisjoner av samme bruker vises ikke) | |||
| Linje 12: | Linje 12: | ||
</div> | </div> | ||
<br/><br/> | <br/><br/> | ||
Trinn to omhandler utjevning av profilet på elementnivå, slik at det oppnås et hastighetsprofil som både tillater utnyttelse av hastighetspotensialet og også sikrer kjørekomfort for lokfører | Trinn to omhandler utjevning av profilet på elementnivå, slik at det oppnås et hastighetsprofil som både tillater utnyttelse av hastighetspotensialet og også sikrer kjørekomfort for lokfører. Et profil uten for mange endringer i hastighet vil også være positivt med tanke på kjøreøkonomi.</br> | ||
De to trinnene er dekket i henholdsvis [[#Beregningsgrunnlag|Beregningsgrunnlag]] og [[#Utjevning av profiler|Utjevning av profiler]]. | De to trinnene er dekket i henholdsvis [[#Beregningsgrunnlag|Beregningsgrunnlag]] og [[#Utjevning av profiler|Utjevning av profiler]]. | ||
| Linje 28: | Linje 28: | ||
* Sportype | * Sportype | ||
* Plattformer | * Plattformer | ||
* Sporveksler | * Sporveksler (avvik) | ||
* Sporveksler (rettspor) | |||
* Støy | |||
* Tunneler | |||
* Signalteknisk | |||
* Bruer | |||
* Lokale forhold | * Lokale forhold | ||
=== Horisontalkurvatur === | === Horisontalkurvatur === | ||
Horisontalkurvaturen er på mange måter selve grunnlaget for tillatt hastighet. Basert på radius, overhøyde og lengde i sirkel- og overgangskurver, kan det beregnes en teoretisk hastighet ved bruk av | Horisontalkurvaturen er på mange måter selve grunnlaget for tillatt hastighet. Basert på radius, overhøyde og lengde i sirkel- og overgangskurver, kan det beregnes en teoretisk hastighet ved bruk av parametere som definert i [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Sporets_tras%C3%A9#Horisontaltras.C3.A9 Horisontaltrasé]. Det må beregnes en teoretisk hastighet for hvert ''element'' på den aktuelle strekningen; et element kan være en rettlinje, en sirkelkurve eller en overgangskurve. | ||
=== Tvangspunkter === | === Tvangspunkter === | ||
| Linje 44: | Linje 49: | ||
Avhengig av kvaliteten på overbygningen kategoriseres en strekning innenfor en overbygningsklasse (se [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Generelle_tekniske_krav#Overbygningsklasser Overbygningsklasser]). Disse klassene stiller krav til skinnestørrelse og svilleavstand. For hver overbygningsklasse er det angitt maksimale hastigheter som ikke skal overskrides. | Avhengig av kvaliteten på overbygningen kategoriseres en strekning innenfor en overbygningsklasse (se [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Generelle_tekniske_krav#Overbygningsklasser Overbygningsklasser]). Disse klassene stiller krav til skinnestørrelse og svilleavstand. For hver overbygningsklasse er det angitt maksimale hastigheter som ikke skal overskrides. | ||
=== Sporveksler === | === Sporveksler (avvik) === | ||
I [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Sporveksler#St.C3.B8rste_hastighet_i_sporveksler Hastighet i sporveksler] er det oppgitt maksimalhastigheter som gjelder for noen typer sporveksler. | I [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Sporveksler#St.C3.B8rste_hastighet_i_sporveksler Hastighet i sporveksler] er det oppgitt maksimalhastigheter som gjelder for noen typer sporveksler. | ||
=== Sporveksler (rettspor) === | |||
Avhengig av type [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Sporveksler#Tungel.C3.A5sing tungelåsing] og [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Sporveksler#Sikring sikring] kan det være hastighetsbegrensninger for gjennomkjøring av sporveksel, også i rettspor. | |||
=== Kontaktledningsanlegg === | === Kontaktledningsanlegg === | ||
| Linje 60: | Linje 68: | ||
=== Planoverganger uten teknisk sikring === | === Planoverganger uten teknisk sikring === | ||
Det stilles krav til sikttid for hver planovergang som ikke anses som sikret/bevoktet. Denne sikttiden medfører at det, avhengig av hvilke siktlengder som kan oppnås på de enkelte planovergangene, vil være en begrensning i hastighet. For grundigere forklaring henvises det til [https://trv.banenor.no/wiki/Overbygning/Vedlikehold/Planoverganger#Siktkrav Siktkrav]. | Det stilles krav til sikttid for hver planovergang som ikke anses som sikret/bevoktet. Denne sikttiden medfører at det, avhengig av hvilke siktlengder som kan oppnås på de enkelte planovergangene, vil være en begrensning i hastighet. For grundigere forklaring henvises det til [https://trv.banenor.no/wiki/Overbygning/Vedlikehold/Planoverganger#Siktkrav Siktkrav].</br></br> | ||
I tillegg til siktkrav, er det satt en maksimal hastighet forbi planoverganger uten teknisk sikring: 130 km/h [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Planoverganger#Sikring_av_planoverganger TRV:03554]. | |||
Obs: Husk å sjekke om planoverganger skal sikres -> Digidoc (%intersection plan%) | |||
=== Planoverganger med teknisk sikring === | === Planoverganger med teknisk sikring === | ||
For planoverganger med teknisk sikring, kan tillatt hastighet begrenses av innkoblingspunktets plassering. Se [https://trv.banenor.no/wiki/Signal/Prosjektering/Veisikringsanlegg#Innkoblingspunkt_.28NSS.29 Innkoblingspunkt] i Teknisk regelverk.<br/> | For planoverganger med teknisk sikring, kan tillatt hastighet begrenses av innkoblingspunktets plassering. Se [https://trv.banenor.no/wiki/Signal/Prosjektering/Veisikringsanlegg#Innkoblingspunkt_.28NSS.29 Innkoblingspunkt] i Teknisk regelverk.<br/> | ||
OBS: Denne hastighetsbegrensningen utgår ved overgang til ERTMS. | OBS: Denne hastighetsbegrensningen utgår ved overgang til ERTMS.</br></br> | ||
I tillegg er det i Teknisk regelverk satt en maksimal hastighet forbi planoverganger med teknisk sikring: 160 km/h [https://trv.banenor.no/wiki/Overbygning/Prosjektering/Planoverganger#Sikring_av_planoverganger TRV:03552]. | |||
=== Støy === | |||
Økt toghastighet fører til at også mengden støy og vibrasjoner øker. Selv om dette ikke er det første en tenker på når hastigheter skal justeres, er det greit å være klar over sammenhengen. | |||
Særlig i tettbygde strøk kan dette være en begrensende faktor. Godstog genererer også betydelig mer støy enn persontog, og det kan sånn sett være mindre problematisk å øke hastighet for passasjertog kontra godstog. | |||
=== Tunneler === | |||
I trange tunneler vil høy hastighet føre til store endringer i lufttrykk, noe som kan oppleves ubehagelig for passasjerer ombord i togene. Ved forholdsvis lave hastigheter er tunnelprofilet sjeldent en begrensning, men ved kombinasjonen høy hastighet / trangt profil kan det være lurt å vurdere hvorvidt passasjerenes komfort opprettholdes (se [https://trv.banenor.no/wiki/Underbygning/Prosjektering_og_bygging/Profiler_og_minste_tverrsnitt#Normalprofil_for_tunneler regelverk, tunneler]) | |||
=== Signalteknisk === | |||
Det kan være begrensninger i hastighet som følge av signaltekniske forhold. Det stilles krav til dekningsgivende objekt dersom området det gis dekning for har hastighet som er større enn 40 km/h ([https://trv.banenor.no/wiki/TRV:02464 TRV:02464]). Her er det <u>ikke</u> tilstrekkelig med sporsperre, men kreves sporveksel eller dobbelt avsporingstunge. Selv om dette ikke har tilbakevirkende kraft, er det greit å vite om slike regler. Det er mao. ikke helt uproblematisk å <i>øke</i> hastigheten. | |||
=== Bruer === | |||
Enkelte bruer, ev. bruer på enkelte strekninger, kan begrense tillatt hastighet. En oversikt over strekninger hvor bruer <i>ikke</i> er dimensjonert for klasse D2 (EN 15528) er gjengitt her: [https://trv.banenor.no/PDF/Infrastrukturens%20egenskaper/590/Vedlegg/T9003d02.pdf Bruer og hastigheter] | |||
=== Lokale forhold === | === Lokale forhold === | ||
I tillegg til de nevnte punktene, kan det være lokale forhold som også legger føringer for tillatt hastighet. En oversikt over slike strekninger ligger i ''Strekningsbeskrivelse for jernbanenettet'' under Operativt regelverk (ORV): [https://orv.banenor.no/sjn/doku.php?id=strekningsbeskrivelse:tillegg#togets_kjorehastighet Togets kjørehastighet]. For flere banestrekninger er det en overhengende rasfare. For slike strekninger kan hastigheten være permanent nedsatt, med den hensikt å redusere konsekvensen dersom det skulle ha gått ras (se [https://orv.banenor.no/sjn/doku.php?id=strekningsbeskrivelse:tillegg#saerlig_hastighet_grunnet_rasfare Hastighet grunnet rasfare]). | I tillegg til de nevnte punktene, kan det være lokale forhold som også legger føringer for tillatt hastighet. En oversikt over slike strekninger ligger i ''Strekningsbeskrivelse for jernbanenettet'' under Operativt regelverk (ORV): [https://orv.banenor.no/sjn/doku.php?id=strekningsbeskrivelse:tillegg#togets_kjorehastighet Togets kjørehastighet]. For flere banestrekninger er det en overhengende rasfare. For slike strekninger kan hastigheten være permanent nedsatt, med den hensikt å redusere konsekvensen dersom det skulle ha gått ras (se [https://orv.banenor.no/sjn/doku.php?id=strekningsbeskrivelse:tillegg#saerlig_hastighet_grunnet_rasfare Hastighet grunnet rasfare]). | ||
Det kan også være forhold utenom dem nevnt i strekningsbeskrivelsen som påvirker hastigheten. For fullstendig oversikt anbefales det å ta kontakt med områdeansvarlig. | Det kan også være forhold utenom dem nevnt i strekningsbeskrivelsen som påvirker hastigheten. For fullstendig oversikt anbefales det å ta kontakt med områdeansvarlig. | ||
== Utjevning av profiler == | == Utjevning av profiler == | ||
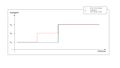
Dette trinnet innebærer å transformere et hastighetsprofil på elementnivå til et profil som oppleves som logisk av den som skal kjøre etter det. Med andre ord inneholder et slikt profil langt færre hastighetsendringer enn et profil som ikke er utjevnet. Et hastighetsprofil vil stort sett alltid bestå av topper, bunner og trappetrinn (se under).<br/> | Dette trinnet innebærer å transformere et hastighetsprofil på elementnivå til et profil som oppleves som logisk av den som skal kjøre etter det. Med andre ord inneholder et slikt profil langt færre hastighetsendringer enn et profil som ikke er utjevnet. Et hastighetsprofil vil stort sett alltid bestå av topper, bunner og trappetrinn (se [[:Fil:Et generisk profil.jpg|figur under]]).<br/> | ||
<div> | <div> | ||
[[Fil:Et generisk profil.jpg|600px|sentrer|Et generisk hastighetsprofil]] | [[Fil:Et generisk profil.jpg|600px|sentrer|Et generisk hastighetsprofil]] | ||
</div> | </div> | ||
Bunner skyldes gjerne krappe kurver, planoverganger med utilstrekkelig sikt eller lokale forhold. Hvor dette er tilfellet må toget uansett ned i hastighet. Etter at en slik hastighetsbegrensning er passert, vil det være naturlig å tillate hastighetsøkning igjen. Derfor kan bunnene være meget korte linjer i hastighetsprofilet. For toppene er situasjonen en annen. Et hastighetsprofil med korte topper fører til hyppige hastighetsendringer, noe som kan oppleves stressende for lokførerne som skal kjøre etter disse hastighetene. Samtidig er ikke gevinsten like stor av å sette opp hastigheten i det øvrige sjiktet av hastighetsprofilet som i det lavere sjiktet. | Bunner skyldes gjerne krappe kurver, planoverganger med utilstrekkelig sikt eller lokale forhold. Hvor dette er tilfellet må toget uansett ned i hastighet. Etter at en slik hastighetsbegrensning er passert, vil det være naturlig å tillate hastighetsøkning igjen. Derfor kan bunnene være meget korte linjer i hastighetsprofilet. For toppene er situasjonen en annen. Et hastighetsprofil med korte topper fører til hyppige hastighetsendringer, noe som kan oppleves stressende for lokførerne som skal kjøre etter disse hastighetene. Samtidig er ikke gevinsten like stor av å sette opp hastigheten i det øvrige sjiktet av hastighetsprofilet som i det lavere sjiktet. Eksempelvis vil en økning fra 60 til 80 km/t over 500 meter gi en tidsgevinst på 7.5 sekunder. Til sammenligning gir en økning fra 110 til 130 km/t over samme distanse, en tidsbesparelse på 2.6 sekunder. | ||
Når det gjelder trappetrinnene mellom topper og bunner i profilet, gjelder følgende anbefaling: Det anbefales at lengden på trappetrinnet er tilstrekkelig for at togene rekker å gjennomføre hele akselerasjonen/retardasjonen innenfor dette aktuelle trappetrinnet.<br/> | Når det gjelder trappetrinnene mellom topper og bunner i profilet, gjelder følgende anbefaling: Det anbefales at lengden på trappetrinnet er tilstrekkelig for at togene rekker å gjennomføre hele akselerasjonen/retardasjonen innenfor dette aktuelle trappetrinnet.<br/> | ||
I denne veilederen gis det anbefalinger for hvordan hastighetsprofiler kan jevnes ut for å oppnå et profil der tidsbesparelse og kjørekomfort er godt balansert. Følgelig er det ikke et ''krav'' at hastighetene jevnes ut med denne metodikken. I tett | I denne veilederen gis det anbefalinger for hvordan hastighetsprofiler kan jevnes ut for å oppnå et profil der tidsbesparelse og kjørekomfort er godt balansert. Følgelig er det ikke et ''krav'' at hastighetene jevnes ut med denne metodikken. I tett trafikkerte områder, der det er ønskelig å utnytte potensialet som ligger i kurvaturen til det ytterste, kan det være hensiktsmessig å tillate kortere topper i hastighetsprofilet enn hva som anbefales her. | ||
=== Faktorer === | === Faktorer === | ||
Når hastighetsprofilet skal jevnes ut, er det flere faktorer som spiller inn. I en forenklet modell kan det antas at de viktigste | Når hastighetsprofilet skal jevnes ut, er det flere faktorer som spiller inn. I en forenklet modell kan det antas at de viktigste parameterne er: | ||
* Hastighet før økning | * Hastighet før økning | ||
* Ønsket hastighet | * Ønsket hastighet | ||
| Linje 93: | Linje 116: | ||
=== Formler og metodikk === | === Formler og metodikk === | ||
I dette underkapittelet forklares det hva som ligger bak de anbefalte distansene som er oppgitt i (<span style="color:#ff0000"> Lenke til tabeller | I dette underkapittelet forklares det hva som ligger bak de anbefalte distansene som er oppgitt i (<span style="color:#ff0000"> Lenke til tabeller eller JavaScript her</span>). Det er kun sett på dimensjonering av lengde på topper i hastighetsprofil.<br/> | ||
For å komme frem til anbefalt distanse som tillater hastighetsøkning, er det benyttet formler for sammenheng mellom hastighet og distanse, gitt konstant akselerasjon/retardasjon. Konstante verdier for akselerasjon og retardasjon er en tilnærming som gjerne benyttes i forbindelse med beregninger innen jernbanetekniske fag. Blant annet, baserer bremsekurvene som benyttes av ATC-systemet seg på en slik tilnærming (ATC Handbok, BVH 544.30004).<br/><br/> | For å komme frem til anbefalt distanse som tillater hastighetsøkning, er det benyttet formler for sammenheng mellom hastighet og distanse, gitt konstant akselerasjon/retardasjon. Konstante verdier for akselerasjon og retardasjon er en tilnærming som gjerne benyttes i forbindelse med beregninger innen jernbanetekniske fag. Blant annet, baserer bremsekurvene som benyttes av ATC-systemet seg på en slik tilnærming (ATC Handbok, BVH 544.30004).<br/><br/> | ||
Distansen det tar å akselerere fra en hastighet til en annen med konstant | Distansen det tar å akselerere fra en hastighet til en annen med konstant akselerasjon er:<br/><br/> | ||
<div style="width: 100px; margin: 0 auto;"> | <div style="width: 100px; margin: 0 auto;"> | ||
<math> | <math> | ||
| Linje 129: | Linje 152: | ||
[[Fil:Generisk hastighetsøkning.png|center|600px|Generisk hastighetsøkning]] | [[Fil:Generisk hastighetsøkning.png|center|600px|Generisk hastighetsøkning]] | ||
<br/> | <br/> | ||
Siden hastighetsøkning kun tillates når siste del av toget har passert skiltet, vil heller ikke togfront kunne akselerere før en avstand lik togets lengde er tilbakelagt. Dette, i tillegg til sikkerhetsmargin knyttet til nedbremsing, reduserer tiden i hastighetstoppen. | Siden hastighetsøkning kun tillates når siste del av toget har passert skiltet, vil heller ikke togfront kunne akselerere før en avstand lik togets lengde er tilbakelagt. Dette, i tillegg til sikkerhetsmargin knyttet til nedbremsing, reduserer tiden i hastighetstoppen. Med andre ord vil situasjonen ute i sporet være mer lik hva som er avbildet i figuren under.</br> | ||
<br/> | <br/> | ||
[[Fil:Hastighetsøkning 2.png|sentrer|620px|Et generisk hastighetsprofil inkludert toglengde og sikkerhetsmargin]] | [[Fil:Hastighetsøkning 2.png|sentrer|620px|Et generisk hastighetsprofil inkludert toglengde og sikkerhetsmargin]] | ||
<br/> | <br/> | ||
<br/> | <br/> | ||
<div style="width: 100px; margin: 0 auto;"> | |||
<math> | |||
s_{AB} = \frac{v_B^2-v_A^2}{2a} + toglengde | |||
Dersom en velger å se bort ifra stigning/fall i sporet og eventuelt toglengde, kan formlene over benyttes direkte med fornuftige valg av | </math> | ||
</div> | |||
</br>, mens</br> | |||
<div style="width: 100px; margin: 0 auto;"> | |||
<math> | |||
s_{BC} = \frac{v_C^2-v_B^2}{2r}+v_C\cdot (t_{bbu}+t_{driver}) | |||
</math> | |||
</div> | |||
</br></br> | |||
Her er <i>toglengde</i> togets lengde, mens t<sub>bbu</sub> og t<sub>driver</sub> er henholdsvis tilsetningstid for bremser og reaksjonstid for lokfører. | |||
</br> | |||
Dersom en velger å se bort ifra stigning/fall i sporet og eventuelt toglengde, kan formlene over benyttes direkte med fornuftige valg av akselerasjon, ''a'', retardasjon, ''r'', og tid i konstant hastighet i profiltopp, ''t''.<br/> | |||
==== Gradientkorreksjon ==== | ==== Gradientkorreksjon ==== | ||
Stigning og fall ute i sporet vil virke inn på togets akselerasjons- og retardasjonsevne. Fall fører til raskere akselerasjon og tregere oppbremsing, stigning | Stigning og fall ute i sporet vil virke inn på togets akselerasjons- og retardasjonsevne. Fall fører til raskere akselerasjon og tregere oppbremsing, stigning det motsatte. En god tilnærming er å enten legge til eller trekke fra gradienten(i promille)/100, avhengig av om det er stigning eller fall. Deretter benyttes denne korrigerte akselerasjons- og retardasjonsverdien videre i beregningene.<br/> | ||
Formelen for korrigert akselerasjon og retardasjon blir:<br/><br/> | Formelen for korrigert akselerasjon og retardasjon blir:<br/><br/> | ||
<div style="width: 100px; margin: 0 auto;"> | <div style="width: 100px; margin: 0 auto;"> | ||
| Linje 153: | Linje 187: | ||
<br/><br/> | <br/><br/> | ||
OBS: Fall er definert som negativ verdi.<br/> | OBS: Fall er definert som negativ verdi.<br/> | ||
I mange tilfeller vil ikke stigningen eller fallet være identisk over hele strekningen for akselerasjon eller oppbremsing. Det kan da benyttes en gjennomsnittlig verdi som rundes til nærmeste 5 ‰, i den retningen som gir lengst akselerasjons-/bremsesone | I mange tilfeller vil ikke stigningen eller fallet være identisk over hele strekningen for akselerasjon eller oppbremsing. Det kan da benyttes en gjennomsnittlig verdi som rundes til nærmeste 5 ‰, i den retningen som gir lengst akselerasjons-/bremsesone. | ||
=== Akselerasjon og retardasjon | === Akselerasjon og retardasjon === | ||
Algoritmen presentert her avhenger av akselerasjon og retardasjon. Dette introduserer usikkerhet. For det første er både akselerasjonen og retardasjonen antatt å være tilnærmet konstant. I realiteten er ikke dette helt korrekt, da begge verdier synker med økende hastighet. For det andre er det vanskelig å anslå hvilke | Algoritmen presentert her avhenger av akselerasjon og retardasjon. Dette introduserer usikkerhet. For det første er både akselerasjonen og retardasjonen antatt å være tilnærmet konstant. I realiteten er ikke dette helt korrekt, da begge verdier synker med økende hastighet. For det andre er det vanskelig å anslå hvilke akselerasjons- og retardasjonsverdier som best gjenspeiler normal rutekjøring, hvilket vil være det mest naturlige å se på. Dette kan blant annet avhenge av togtype og rutetabeller. Det er en forutsetning at anbefalingene gitt i denne veilederen fører til hastighetsprofiler som oppleves logiske uavhengig av slike forskjeller.</br></br> | ||
<div> | <div> | ||
[[Fil: | [[Fil:Utsnitt has prof.jpg|1100px|rammeløs|sentrer|Utsnitt, hastighetsprofil]] | ||
</div> | </div> | ||
==== | Figuren over illustrerer hvilke akselerasjoner og retardasjoner som kan være med i en modell. | ||
Her presenteres grunnlag for beregning av retardasjon | * '''Maks akselerasjon, togende''': Dersom det er ønskelig å justere/ optimalisere plassering av startpunkt for akselerasjon, er det viktig å ha kontroll på maksimal akselerasjon på det raskest akselererende toget som benytter profilet. Konsekvensen av å ikke benytte den absolutt høyeste akselerasjonen, er at toget med raskest akselerasjon vil få tillatelse til å starte akselerasjon for tidlig, og dermed kjøre for fort i forhold til beregnet hastighet. På mange måter kan man si at denne mørkegrønne linjen representerer togets bakende, da hele togets lengde som kjent skal passere punkt for hastighetsøkning før akselerasjon kan initieres. | ||
* '''Driftsakselerasjon, togfront''': Denne linjen illustrerer hvordan et typisk tog som benytter profilet kjører. Punktet der den lysegrønne linjen treffer hastighetsprofilet i ny (forhøyet) hastighet er altså hvor togets front når den nye hastigheten. Denne linjen har ingenting med sikkerhet å gjøre, men benyttes til å bestemme om hastighetstoppen er tilstrekkelig lang til å forsvare akselerasjonen. | |||
* '''Nødbremseretardasjon, togfront''': Dersom det er ønskelig å justere/ optimalisere plassering av startpunkt for retardasjon, er det viktig å ha kontroll på maksimal retardasjon på det toget med kraftigst bremser. Dette av samme grunn som for maksimal akselerasjon. | |||
* '''Driftsretardasjon, togfront''': Denne linjen illustrerer hvordan et typisk tog som benytter profilet kjører. Det er antatt at lokførerne følger ERTMS-bremsekurve "Permitted", altså tillatt hastighet. Denne bremsekurven kommer, som en kan se, ned i hastighet et stykke foran punktet hvor nødbremsekurven ender. Dette skyldes sikkerhetsmarginer i systemet. Linjen har ingenting med sikkerhet å gjøre, men benyttes for å bestemme om hastighetstoppen er tilstrekkelig lang til å forsvare akselerasjonen. | |||
</br> | |||
==== Retardasjon ==== | |||
Her presenteres grunnlag for beregning av retardasjon. Siden ERTMS (European Rail Traffic Management System) tar over stafettpinnen fra ATC (Automatic Train Control), er det ERAs(European Union Agency for Railways) formelverk som er benyttet.<br/><br/> | |||
===== Nødbremsekurve ===== | |||
Når ERTMS-bremsekurvene kalkuleres benyttes det ulike retardasjonsverdier i forskjellige hastighetsintervall. Kurvene får dermed knekkpunkter. | Når ERTMS-bremsekurvene kalkuleres benyttes det ulike retardasjonsverdier i forskjellige hastighetsintervall. Kurvene får dermed knekkpunkter. | ||
Det første av disse knekkpunktene finner en ved hastighet <math>V_{lim}</math>. Denne grenseverdien finnes gjennom den empiriske formelen: | Det første av disse knekkpunktene finner en ved hastighet <math>V_{lim}</math>. Denne grenseverdien finnes gjennom den empiriske formelen: | ||
| Linje 177: | Linje 218: | ||
</math> | </math> | ||
</div> | </div> | ||
Hvordan bremseprosenten påvirker V<sub>lim</sub> og nødbremseretardasjon er illustrert i følgende tabell: | |||
<br/> | <br/> | ||
{| class="wikitable" style="margin-left: auto; margin-right: auto; border: none;" | |||
Når hastigheten overstiger < | |+ Tabell ?: V<sub>lim</sub> og nødbremsretardasjon for forskjellig bremseprosent | ||
Retardasjonen vil uavhengig av intervall ha en lavere verdi enn retardasjon under < | |- | ||
! scope="col" | Bremseprosent, λ | |||
! scope="col" | V<sub>lim</sub> [km/t] | |||
! scope="col" | Nødbremseretardasjon [m/s<sup>2</sup>] | |||
|- | |||
| 70 || 103.82 || 0.601 | |||
|- | |||
| 100 || 120.95 || 0.826 | |||
|- | |||
| 152 || 144.69 || 1.216 | |||
|} | |||
<br/> | |||
Eksempelvis blir V<sub>lim</sub> og r for et tog med bremseprosent 152 % henholdsvis 144,69 km/t og 1,216 m/s<sup>2</sup>.<br/> | |||
Når hastigheten overstiger V<sub>lim</sub> regnes retardasjonen ut ved hjelp av et tredjegradspolynom med tilhørende inngangsparametere. Hvilke parametere som benyttes avhenger av hastighetsintervall. For mer informasjon, se Subset 26-3, A.3.7 ([https://www.era.europa.eu/content/set-specifications-3-etcs-b3-r2-gsm-r-b1_en ETCS Set of Specifications]). | |||
Retardasjonen vil uavhengig av intervall ha en lavere verdi enn retardasjon under V<sub>lim</sub>. Dette er logisk, da adhesjonen mellom hjul og skinne som kjent svekkes ved høyere hastigheter.<br/> | |||
Ved videre beregning av bremsekurver, finnes en verdi for hva som regnes som 'trygg' retardasjon. Her hensyntas stigning/fall, og det er også mulig å legge inn faktorer for forskjellige hastighetsintervaller og toglengder. Faktorene som benyttes for forskjellige land er en del av de nasjonale verdiene som legges inn i systemet. I Norge er disse justert slik at sikkerhetsmarginene ligger i nærheten av hva de gjør med ATC.<br/><br/> | Ved videre beregning av bremsekurver, finnes en verdi for hva som regnes som 'trygg' retardasjon. Her hensyntas stigning/fall, og det er også mulig å legge inn faktorer for forskjellige hastighetsintervaller og toglengder. Faktorene som benyttes for forskjellige land er en del av de nasjonale verdiene som legges inn i systemet. I Norge er disse justert slik at sikkerhetsmarginene ligger i nærheten av hva de gjør med ATC.<br/><br/> | ||
Eksempelvis vil trygg retardasjon for et | Eksempelvis vil trygg retardasjon for et passasjertog med lengde 220 m og bremseprosent 152 under V<sub>lim</sub> være<br/> | ||
<div style="width: 100px; margin: 0 auto;"> | <div style="width: 100px; margin: 0 auto;"> | ||
<math>0.7\cdot 1.0\cdot 1.216 = 0.8512</math> | <math>0.7\cdot 1.0\cdot 1.216 = 0.8512</math> | ||
</div> | </div> | ||
, der 0.7 er hastighetsavhengig korreksjonsfaktor, 1.0 er korreksjonsfaktor for toglengde og 1.216 er nødbremsretardasjonen. | , der 0.7 er hastighetsavhengig korreksjonsfaktor, 1.0 er korreksjonsfaktor for toglengde og 1.216 er nødbremsretardasjonen. | ||
<br/> | <br/> | ||
For godstog kompliseres utregningen ytterligere, da det er ulike korreksjonsfaktorer for hastigheter over og under 60 km/t (henholdsvis 0,94 og 0,82). | |||
Ved å benytte høyeste korreksjonsfaktor blir trygg retardasjon for godstog med P-brems under V<sub>lim</sub><br/> | |||
<br/> | <div style="width: 100px; margin: 0 auto;"> | ||
<math>0.94\cdot 1.0\cdot 0.826= 0.776</math> | |||
<div> | |||
</div> | </div> | ||
<br/> | <br/><br/><br/> | ||
<br/> | ===== Servicebremse/ normal nedbremsing ===== | ||
Når en skal vurdere hvor normal nedbremsing begynner ved bruk av ERTMS, er det naturlig å anta at lokførerne forsøker å følge ERTMS' Permitted-kurve så godt det lar seg gjøre. Avstanden fra Permitted-kurven til nødbremsekurven avhenger av flere parametere, blant annet sikkerhetsfaktorer, toglengde, hva slags type tog det er snakk om, bremsgruppe og lokførers reaksjonstid (satt verdi). Den vil også avhenge av baliseplassering (posisjonsusikkerhet). | |||
==== | |||
Når en skal vurdere hvor normal nedbremsing begynner ved bruk av ERTMS, er det naturlig å anta at lokførerne forsøker å følge ERTMS' Permitted-kurve så godt det lar seg gjøre. Avstanden fra Permitted-kurven til nødbremsekurven avhenger av flere | |||
Å finne den eksakte avstanden er temmelig komplisert (for fullstendig forklaring, henvises det til se Subset 26-3 [https://www.era.europa.eu/content/set-specifications-3-etcs-b3-r2-gsm-r-b1_en ETCS Set of Specifications]), men siden motivasjonen for å finne dette punktet er å sikre lokførers kjørekomfort (går ikke ut over sikkerhet), kan det tillates å foreta noen forenklinger.<br/> | Å finne den eksakte avstanden er temmelig komplisert (for fullstendig forklaring, henvises det til se Subset 26-3 [https://www.era.europa.eu/content/set-specifications-3-etcs-b3-r2-gsm-r-b1_en ETCS Set of Specifications]), men siden motivasjonen for å finne dette punktet er å sikre lokførers kjørekomfort (går ikke ut over sikkerhet), kan det tillates å foreta noen forenklinger.<br/> | ||
Figuren under viser plasseringen av de forskjellige bremsekurvene i forhold til hverandre. | Figuren under viser plasseringen av de forskjellige bremsekurvene i forhold til hverandre. | ||
| Linje 217: | Linje 261: | ||
</div> | </div> | ||
<br/><br/> | <br/><br/> | ||
Ved å gjøre noen forenklinger, kan en si at avstanden mellom Permitted-kurven og EBD-kurven er tilnærmet lik | Ved å gjøre noen forenklinger, kan en si at avstanden mellom Permitted-kurven og EBD-kurven (Emergency Brake Deceleration) er tilnærmet lik | ||
<div style="width: 100px; margin: 0 auto;"> | <div style="width: 100px; margin: 0 auto;"> | ||
<math>S_{EBD-P}=V\cdot (T_{driver}+t_{be})</math> | <math>S_{EBD-P}=V\cdot (T_{driver}+t_{be})</math> | ||
</div> | </div> | ||
<br/> | <br/> | ||
Punktet hvor Permitted-kurven begynner ligger et gitt antall sekunder foran start på nødbremsekurve. Mens < | Punktet hvor Permitted-kurven begynner ligger et gitt antall sekunder foran start på nødbremsekurve. Mens <i>T<sub>driver</sub></i> er en konstant verdi som ligger inne i systemet, er ekvivalent tilsetningstid for nødbrems, t<sub>be</sub>, en parameter som avhenger av sikkerhetsfaktorer, toglengde, togtype og bremsegruppe. Først finnes tilsetningstid fra følgende formel (se Subset 26-3 for ytterligere forklaringer):<br/> | ||
<div style="width: 100px; margin: 0 auto;"> | <div style="width: 100px; margin: 0 auto;"> | ||
<math> | <math> | ||
| Linje 229: | Linje 273: | ||
</div> | </div> | ||
<br/> | <br/> | ||
Avhengig av toglengde, togtype og bremsegruppe benyttes | Avhengig av toglengde, togtype og bremsegruppe benyttes det forskjellige verdier for a, b, c og L'. Noen eksempler er vist i tabell under.<br/> | ||
{| class="wikitable" style="margin-left: auto; margin-right: auto; border: none;" | |||
|+ Tabell ?: Grunnleggende tilsetningstid for nødbrems | |||
|- | |||
! scope="col" | Togtype | |||
! scope="col" | Bremsegruppe | |||
! scope="col" | Lengde [m] | |||
! scope="col" | a | |||
! scope="col" | b | |||
! scope="col" | c | |||
! scope="col" | L' | |||
! scope="col" | Tilsetningstid [s] | |||
|- | |||
| Passasjer || P || 220 || 2.3 || 0.0 || 0.17 || 400 || 5.02 | |||
|- | |||
| Gods || P || 400 || 2.3 || 0.0 || 0.17 || 400 || 5.02 | |||
|- | |||
| Gods || P || 700 || 2.3 || 0.0 || 0.17 || 700 || 10.63 | |||
|- | |||
| Gods || G || 400 || 12 || 0.0 || 0.05 || 400 || 12.80 | |||
|- | |||
| Gods || G || 700 || 12 || 0.0 || 0.05 || 700 || 14.45 | |||
|} | |||
Endelig tilsetningstid oppnås ved å introdusere de to korreksjonsfaktorene ''Kt_int'' og ''Kto''. Førsnevnte er en del av nasjonale verdier og kan således endres, mens sistnevnte er systembestemt (1.16 for godstog med "G"-brems, ellers 1.2).<br/> | |||
{| class="wikitable" style="margin-left: auto; margin-right: auto; border: none;" | |||
|+ Tabell ?: Grunnleggende tilsetningstid for nødbrems | |||
|- | |||
! scope="col" | Togtype | |||
! scope="col" | Bremsegruppe | |||
! scope="col" | Lengde [m] | |||
! scope="col" | Kto | |||
! scope="col" | Kt_int | |||
! scope="col" | t_be | |||
|- | |||
| Passasjer || P || 220 || 1.2 || 1.3 || 7.83 | |||
|- | |||
| Gods || P || 400 || 1.2 || 1.3 || 7.83 | |||
|- | |||
| Gods || P || 700 || 1.2 || 1.3 || 16.58 | |||
|- | |||
| Gods || G || 400 || 1.16 || 1.3 || 19.30 | |||
|- | |||
| Gods || G || 700 || 1.16 || 1.3 || 21.79 | |||
|} | |||
Ved å legge til sekunder tilsvarende parameteren T<sub>driver</sub>, ender en opp med et estimat på hvor langt foran nødbremsekurve Permitted-kurven begynner. For et passasjertog på 220 m med bremseprosent 152 blir dette omtrent 12 sekunder. I en modell kan startpunktet for Permitted-kurven nå tilnærmes ved å multiplisere hastigheten med denne tiden, og trekke denne distansen fra startpunkt for den modellerte EBD-kurven. Dette er gjort i figuren under, der det også kommer tydelig fram at modellen klarer å tilnærme startpunkt for Permitted-kurven med god nøyaktighet. | |||
<div> | <div> | ||
[[Fil:Ertms model vs real.png|700px|rammeløs|sentrer|Sammenligning, ERTMS og modell]] | |||
</div> | </div> | ||
<br/> | <br/> | ||
Ved økende hastigheter ''over'' V<sub>lim</sub> vil en se en proporsjonalt økende avstand mellom modellert punkt og reelt punkt. Dette skyldes som nevnt tidligere at retardasjonen tilnærmes til en konstant verdi uavhengig av hastighet, mens den i realiteten avtar noe ved høyere hastigheter. Dette bør allikevel ikke være problematisk, all den tid hastigheten på de strekningene med hyppige hastighetsendringer stort sett ligger under V<sub>lim</sub>. På nyere strekninger blir ikke dette punktet like relevant, da de gjerne prosjekteres slik at hastigheten ''kan'' opprettholdes over en lengre strekning. | |||
< | <!-- | ||
<div> | |||
[[Fil:ERTMS-bremsekurver2.png|550px|ERTMS-bremsekurver]] | |||
< | |||
< | |||
</div> | </div> | ||
--> | |||
==== Akselerasjon ==== | |||
Som for retardasjonen er det av interesse å se på to forskjellige akselerasjonskurver, én som modellerer maksimal akselerasjon (knyttet til sikkerhet) og én knyttet til typisk akselerasjon (knyttet til kjørekomfort). Akselerasjon kan ikke foretas uten at hele togets lengde har passert punktet for hastighetsøkning. Derfor kan en si at den førstnevnte kurven følger togets bakende mens den sistnevnte følger togets front.<br/> | |||
===== Maksimal akselerasjon ===== | |||
Når startpunkt for hastighetsøkning skal justeres, analogt med for retardasjon, er det kurven for maksimal akselerasjon som benyttes. Det er dermed viktig at ingen av togene som trafikkerer strekningen har en raskere akselerasjon enn den som benyttes her. | |||
Maksimal akselerasjon for de vanligste passasjertogene er vist i tabell ?.<br/> | |||
For godstog avhenger akselerasjonen av hvordan toget er satt sammen. Det kan være verdt å huske på at f.eks. løslok også kan kjøre på godsprofil, og at disse har en meget rask teoretisk akselerasjon. | |||
{| class="wikitable" style="margin-left: auto; margin-right: auto; border: none;" | |||
|+ Tabell ?: Utvalgte togtyper og maksimal akselerasjon/ bremseprosent | |||
|- | |||
! scope="col" | Togtype | |||
! scope="col" | Egenvekt [tonn] | |||
! scope="col" | Maksimal trekkraft [kN] | |||
! scope="col" | Faktor for roterende masse | |||
! scope="col" | Maks akselerasjon [m/s<sup>2</sup>] | |||
! scope="col" | Bremseprosent [%] | |||
|- | |||
| Type 72 || 164 || 186 || 1.05 || 1.08 || 151 | |||
|- | |||
| Type 73 || 234 || 117 || 1.05 || 0.48 || 160 | |||
|- | |||
| Type 74 || 218 || 240 || 1.05 || 1.05 || 152 | |||
|- | |||
| Type 75 || 218 || 240 || 1.05 || 1.05 || 152 | |||
|- | |||
| Type 93 || 84 || 90 || 1.05 || 1.02 || 155 | |||
|- | |||
| EL18 + 9 x B7 || 457 || 275 || 1.05 || 0.57 || 155 | |||
|} | |||
<p>OBS: Akselerasjon over kort tid kan overstige denne verdien. F.eks. Flirt -> 1.4 m/s<sup>2</sup></p> | |||
===== Typisk akselerasjon ===== | |||
Den typiske akselerasjonen benyttes til å estimere hvor lang tid lokfører får per hastighetssegment. Siden det vil være flere togtyper som kjører på samme profil, vil det være individuelle forskjeller i akselerasjon disse imellom. Allikevel kan det benyttes én akselerasjonsverdi per hastighetsprofil, som da vil gjenspeile et dimensjonerende togs antatte akselerasjon.</br> | |||
[[Fil:Togakselerasjon.png|600px|rammeløs|sentrer|Tog som akselererer]] | |||
</br> | |||
Da denne akselerasjonsverdien brukes i estimering av kjøretid i hastighetstopp, vil det si at raskere tog (enn dimensjonerende) vil få mer tid i konstant hastighet, mens tregere tog opplever det motsatte. | |||
Perfekt for alle tog vil aldri profilene bli, men målet er å ende opp med et godt kompromiss.</br>Det er viktig å være klar over at konstant akselerasjon er en tilnærming. I realiteten avtar akselerasjonen med økende hastighet. Dette skyldes avtagende adhesjon med tilhørende reduksjon i trekkraft. En mer realistisk tilnærming vil være å benytte faktiske trekkraftdiagrammer. Dette er diagrammer som viser sammenhengen mellom hastighet og trekkraft (se under). Som en kan se, avtar akselerasjonen med økende hastighet, og det vil altså være stor forskjell på akselerasjonen fra f.eks. 0 til 40 km/t kontra 160 til 200 km/t. Ser en på et Flirt-tog som følger maks-kurven i trekkraftdiagrammet, vil gjennomsnittlig akselerasjon for disse to hastighetsøkningene være ca. 0.95 m/s<sup>2</sup> og 0.35 m/s<sup>2</sup>(!). En modellert konstant akselerasjon vil altså <u>ikke</u> være en god tilnærming over hele hastighetsintervallet. Siden de fleste norske banestrekninger har en kurvatur som ikke tillater veldig høye hastigheter, vil det være fornuftig å benytte en modellert akselerasjon som er gjeldende for lavere hastigheter (under 130 km/t). | |||
[[Fil:Trekkraft.jpg|sentrer|600px|Trekkraftdiagram for Flirt-sett]] | |||
</ | |||
< | |||
< | |||
< | |||
<!--<div> | <!--<div> | ||
| Linje 437: | Linje 391: | ||
Anbefalte verdier for forskjellige togkategorier er presentert i tabell under:<br/> | Anbefalte verdier for forskjellige togkategorier er presentert i tabell under:<br/> | ||
{| class="wikitable" style="margin-left: auto; margin-right: auto; border: none;" | |||
|+ Tabell ?: Anbefalte verdier | |||
|- | |||
! scope="col" | Togkategori | |||
! scope="col" | Høyeste bremseprosent [%] | |||
! scope="col" | V_lim [km/t] | |||
! scope="col" | Maks retardasjon [m/s<sup>2</sup>] | |||
! scope="col" | Dimensjonerende toglengde [m] | |||
! scope="col" | Tilsetningstid + T_driver [sek] | |||
! scope="col" | Maks akselerasjon [m/s<sup>2</sup>] | |||
! scope="col" | Typisk akselerasjon [m/s<sup>2</sup>] | |||
< | |||
< | |||
</ | |||
|- | |||
| Konvensjonelt materiell || 100 || 120.95 || 0.7 || 400 || 23 || 2.0 || 0.5 | |||
|- | |||
| Plussmateriell || 160 || 147.9 || 0.9 || 220 || 12 || 2.0 || 0.9 | |||
|- | |||
| Krengetog || 160 || 147.9 || 0.9 || 220 || 12 || 2.0 || 0.9 | |||
|} | |||
</br> | |||
For å beregne nødvendig distanse for å tillate en gitt hastighet, trengs det også et tidskriterium: et minstekrav til tid et tog må kjøre i konstant hastighet. | |||
</br>Forslag til verdier er gitt under: | |||
{| class="wikitable" style="margin-left: auto; margin-right: auto; border: none;" | |||
|+ Tabell ?: Anbefalte verdier for minstetid i hastighetstopp | |||
|- | |||
! scope="col" | Togkategori | |||
! scope="col" | Minstetid i hastighetstopp [s] | |||
|- | |||
| Konvensjonelt materiell || 40 | |||
|- | |||
| Plussmateriell || 30 | |||
|- | |||
| Krengetog || 30 | |||
|} | |||
</br> | |||
I prosessen med å utarbeide hastighetsprofiler, har <u>ikke</u> optimalisering av plassering av hastighetsøkning/-nedsettelse blitt benyttet. Dels fordi det er mer intuitivt å forholde seg til hastighetsprofiler der endring av hastighet skjer på samme kilometer. Dette er ofte ikke tilfellet når plasseringen optimaliseres. Den andre grunnen er at det er utfordrende å være sikker på hvilke verdier for akselerasjon og retardasjon som skal benyttes. Hadde det kun vært snakk om én type tog innenfor samme profil, hadde oppgaven vært langt enklere. Høye verdier av akselerasjon gir uansett mindre besparelser, og derfor er det vurdert som mye jobb for lite besparelse.</br> | |||
Det er allikevel tatt med her for å vise at det er mulig å spare noe tid. | |||
=== Optimalisering forklart === | |||
[[Fil: | Når hastighetsprofil jevnes ut, kan det ofte være noe tid å hente på å justere punkt for hastighetsøkning og -reduksjon. Poenget her er å flytte punktet slik at et tog med den retardasjonen eller akselerasjonen som er antatt, <i>akkurat</i> overholder beregnet hastighet. Dette er illustrert i figuren under, der en kan se at en flytting av punkt gir en viss besparelse i tid. Av formelen for spart tid ser en at besparelsen avhenger av differansen mellom de to hastighetene. Dette er logisk, da man på sett og vis flytter avstanden Δx fra den lave hastigheten til den høye. <br/> | ||
<br/><br | <div> | ||
[[Fil:Justering hastighet.png|700px|Hastighet, ikke justert]] [[Fil:Hastighet justert.png|700px|Hastighet, justert]] | |||
< | </div> | ||
<br/> | |||
Et annet eksempel som endrer plassering av hastighets<i>økning</i> er vist under. Legg merke til at desto lavere akselerasjonen for det tenkte toget er, desto lengre kan startpunktet flyttes.</br> | |||
<gallery mode="slideshow"> | |||
Fil:Aks lav.jpg|Lav akselerasjon | |||
Fil:Aks middels.jpg|Middels akselerasjon | |||
Fil:Aks hoy.jpg|Høy akselerasjon | |||
Fil:Aks inf.jpg|Uendelig akselerasjon | |||
</gallery> | |||
= | Slike justeringer fordrer at realistiske retardasjonsverdier benyttes, og disse bør være konservative. Konsekvensen av å benytte for lave verdier for retardasjon er at sluttpunktet plasseres for langt inn i en kurve (eller annen hastighetsbegrensning), og i verste fall vil togets hastighet kunne overskride beregnet hastighet med mer enn hva systemets marginer tillater.<br/> | ||
Slik systemet er designet, ligger det inne marginer som gjelder for de forskjellige bremsekurvene. "Emergency Brake Deceleration"(EBD)-kurven i ERTMS går ikke ned til målhastighet, men til V = målhastighet + dV_ebi_min (for hastigheter under fastsatt verdi V_ebi_min). For hastigheter under 110 km/t vil denne marginen være på 7.5 km/t. Med andre ord kan et tog entre en hastighetsbegrensning i opptil 7.5 km/t over tillatt hastighet. Dette vil kunne oppleves ubehagelig for passasjerer i og med at komfortparameterne i Teknisk regelverk overskrides. Det vil også være mulig å ligge konstant i 7 km/t over tillatt hastighet uten at dette utløser nødbrems (dette vil trigge lys- og lydvarsel). | |||
<br/> | |||
<div> | |||
[[Fil:Ertms ebd.png|800px|sentrer|Område der "Emergency Brake Deceleration"-kurve ligger over beregnet hastighet]] | |||
</div> | |||
<br/> | |||
<br/> | |||
Ved å tilpasse hastighetsprofilene ved hjelp av ''trygg'' retardasjonsverdi sikres det at tog (med samme bremseprosent) maksimalt holder 7.5 km/t over tillatt hastighet ''dersom'' terskelhastighet for nødbremseinngrep overskrides. Som nevnt, gjelder den trygge retardasjonen opp til en viss hastighet (144 km/t for bremseprosent på 152). Når hastigheten er høyere enn denne terskelhastigheten, avtar retardasjonsverdien. Det vil altså være en konservativ tilnærming å benytte den trygge retardasjonen som gjelder opp til terskelhastighet for hele hastighetsintervallet, uavhengig av om hastigheten faktisk er høyere. Det vil altså være noe uutnyttet potensial i profiler med høye hastigheter. Med tanke på hvor mye mer krevende slike beregninger vil være, er det nok allikevel en god løsning å benytte samme retardasjonsverdi for alle hastigheter.<br/> | |||
I figuren under viser det skraverte grønne feltet forskjellen mellom reell retardasjon og konstant retardasjon satt lik verdi gjeldende for <math>V \leq V_{lim}</math>. | |||
<div> | |||
[[Fil:Ertms unrealised potensial.png|700px|rammeløs|sentrer|Urealisert potensial ved justering av hastighetsprofil]] | |||
</div> | |||
< | === Dagens situasjon === | ||
Dersom man benytter metodologi som beskrevet her, ser en at flere av dagens hastighetsprofiler er satt langt mer aggressivt. Det er altså forventet at lokfører i stor grad skal utnytte potensialet i traseen fullt ut.<br/> | |||
En kan alltids spørre seg om hvorvidt slike hastighetsprofiler fører til økt stressnivå for førerne, eller om det elegant løses ved å se på skiltingen langs sporet som veiledende.<br/> | |||
Figuren under viser et eksempel hentet fra Gjøvikbanen, retning Gjøvik, og illustrerer hvor mye tid en lokfører anslagsvis får i konstant hastighet før bremsefasen initieres (godsprofil). Den korte tiden for flere av disse hastighetstoppene kan medføre et økt stressnivå for lokfører.<br/> | |||
</ | I dette eksempelet er også hastigheten i enkelte kurver for høy i forhold til beregnet hastighet basert på parametere i Teknisk regelverk. Dette kan skyldes at hastighetene ikke er oppdatert etter skjerping av kravene i regelverket.<br/><br/> | ||
= | {| style="width:1200px; margin-left: auto; margin-right: auto; border: none" | ||
|[[Fil:Hastighet gjøvik.png|1200px]] | |||
|} | |||
< | <!--[[Fil:Hastighet gjøvik.png|400px|ramme|sentrer|Deler av hastighetsprofil (konvensjonelt materiell), Gjøvikbanen]]--> | ||
<br/><br/> | |||
=== Formel === | |||
(Javascript) sett inn formel på formen: [https://trv.jbv.no/regnestykker/atc/atc_formel%202016.html Lenke til formel] | |||
Får ikke lagt inn lenke til riktig formel her ennå, mulig å fikse hvis dette er noe å gå videre med. Ser sånn ut: | |||
[[Fil:Javascript distanse.jpg|700px|sentrer|Javascript, distanse]] | |||
Siste sideversjon per 13. mar. 2023 kl. 16:59
Hastigheter, veileder
Hensikt
Denne veilederen er ment å være et hjelpemiddel som kan benyttes ved prosjektering av hastigheter. Ved å følge retningslinjene som er oppgitt her, sikres det at det resulterende hastighetsprofilet er i tråd med allerede eksisterende hastighetsprofiler. Bla, bla, bla
Hastighet over lengre strekninger
Fastsettelse av hastighet kan deles inn i to trinn. Det første trinnet innebærer å samle all nødvendig data knyttet til sporets trasé. Med dette tilgjengelig, kan det utarbeides et hastighetsprofil på elementnivå: et profil som viser hvilken hastighet som kan tillates for hvert enkelte element. Et eksempel på et slik profil er vist under (merk at det endelige profilet tar hensyn til flere faktorer).


Trinn to omhandler utjevning av profilet på elementnivå, slik at det oppnås et hastighetsprofil som både tillater utnyttelse av hastighetspotensialet og også sikrer kjørekomfort for lokfører. Et profil uten for mange endringer i hastighet vil også være positivt med tanke på kjøreøkonomi.
De to trinnene er dekket i henholdsvis Beregningsgrunnlag og Utjevning av profiler.
Beregningsgrunnlag
Det er flere faktorer som må tas hensyn til når hastigheten over en strekning skal vurderes. Punktlisten som følger, kan i så måte fungere som en sjekkliste.
Forhold som påvirker tillatt hastighet, er:
- Horisontalkurvatur
- Vertikalkurvatur
- Kontaktledningsanlegg
- Overbygningsklasse
- Planoverganger uten teknisk sikring
- Planoverganger med teknisk sikring
- Tvangspunkter
- Hastighetsovervåkning
- Sportype
- Plattformer
- Sporveksler (avvik)
- Sporveksler (rettspor)
- Støy
- Tunneler
- Signalteknisk
- Bruer
- Lokale forhold
Horisontalkurvatur
Horisontalkurvaturen er på mange måter selve grunnlaget for tillatt hastighet. Basert på radius, overhøyde og lengde i sirkel- og overgangskurver, kan det beregnes en teoretisk hastighet ved bruk av parametere som definert i Horisontaltrasé. Det må beregnes en teoretisk hastighet for hvert element på den aktuelle strekningen; et element kan være en rettlinje, en sirkelkurve eller en overgangskurve.
Tvangspunkter
Tvangspunkter i sporet kan være en begrensende faktor, avhengig av togkategori og plassering. Trasé gjennom kurveveksler og bruer uten ballast kan føre til skjerpede grenseverdier (se Horisontaltrasé), og effekten kan være en lavere hastighet enn hva som ville vært tilfellet uten tvangspunkt i sporet.
Vertikalkurvatur
Selv om horisontalkurvaturen er langt mer førende for hastigheten, finnes det også begrensninger knyttet til vertikalkurvatur. Se Vertikalkurver i regelverket.
I tillegg påvirker stigning og fall togets akselerasjon og retardasjon, og får dermed betydning når hastighetsprofilet skal utjevnes.
Overbygningsklasse
Avhengig av kvaliteten på overbygningen kategoriseres en strekning innenfor en overbygningsklasse (se Overbygningsklasser). Disse klassene stiller krav til skinnestørrelse og svilleavstand. For hver overbygningsklasse er det angitt maksimale hastigheter som ikke skal overskrides.
Sporveksler (avvik)
I Hastighet i sporveksler er det oppgitt maksimalhastigheter som gjelder for noen typer sporveksler.
Sporveksler (rettspor)
Avhengig av type tungelåsing og sikring kan det være hastighetsbegrensninger for gjennomkjøring av sporveksel, også i rettspor.
Kontaktledningsanlegg
Dersom jernbanestrekningen er elektrifisert, kan det være hastighetsbegrensninger knyttet til kontaktledningsanlegget. Eldre kontaktledningssystemer, som f.eks. Tabell 54 og System 35MS har en mekanisk utforming som ikke tåler de samme hastighetene som nyere systemer, som S25. Se Mekaniske utforminger for en oversikt over kontaktledningsanlegg med tilhørende maksimalhastigheter.
Hastighetsovervåkning
For strekninger med delvis automatisk hastighetsovervåkning (DATC) begrenses hastigheten til 130 km/t (se DATC, Generelt).
Sportype
Krav i regelverket kan avhenge av hva slags sportype det er snakk om. Eksempelvis er det ulike grenseverdier for sprang i manglende overhøyde avhengig av sportypen (se Kurver uten overgangskurver.
Plattformer
Manglende bredde på sikkerhetssone kan begrense hastigheten. For en oversikt over hvilken bredde på sikkerhetssonen som kreves for ulike hastigheter henvises det til Sikkerhetssone. Vær også klar over at det stilles krav til varsling av passerende tog, og at disse avhenger av hastighet (se Varsling av tog).
Planoverganger uten teknisk sikring
Det stilles krav til sikttid for hver planovergang som ikke anses som sikret/bevoktet. Denne sikttiden medfører at det, avhengig av hvilke siktlengder som kan oppnås på de enkelte planovergangene, vil være en begrensning i hastighet. For grundigere forklaring henvises det til Siktkrav.
I tillegg til siktkrav, er det satt en maksimal hastighet forbi planoverganger uten teknisk sikring: 130 km/h TRV:03554.
Obs: Husk å sjekke om planoverganger skal sikres -> Digidoc (%intersection plan%)
Planoverganger med teknisk sikring
For planoverganger med teknisk sikring, kan tillatt hastighet begrenses av innkoblingspunktets plassering. Se Innkoblingspunkt i Teknisk regelverk.
OBS: Denne hastighetsbegrensningen utgår ved overgang til ERTMS.
I tillegg er det i Teknisk regelverk satt en maksimal hastighet forbi planoverganger med teknisk sikring: 160 km/h TRV:03552.
Støy
Økt toghastighet fører til at også mengden støy og vibrasjoner øker. Selv om dette ikke er det første en tenker på når hastigheter skal justeres, er det greit å være klar over sammenhengen. Særlig i tettbygde strøk kan dette være en begrensende faktor. Godstog genererer også betydelig mer støy enn persontog, og det kan sånn sett være mindre problematisk å øke hastighet for passasjertog kontra godstog.
Tunneler
I trange tunneler vil høy hastighet føre til store endringer i lufttrykk, noe som kan oppleves ubehagelig for passasjerer ombord i togene. Ved forholdsvis lave hastigheter er tunnelprofilet sjeldent en begrensning, men ved kombinasjonen høy hastighet / trangt profil kan det være lurt å vurdere hvorvidt passasjerenes komfort opprettholdes (se regelverk, tunneler)
Signalteknisk
Det kan være begrensninger i hastighet som følge av signaltekniske forhold. Det stilles krav til dekningsgivende objekt dersom området det gis dekning for har hastighet som er større enn 40 km/h (TRV:02464). Her er det ikke tilstrekkelig med sporsperre, men kreves sporveksel eller dobbelt avsporingstunge. Selv om dette ikke har tilbakevirkende kraft, er det greit å vite om slike regler. Det er mao. ikke helt uproblematisk å øke hastigheten.
Bruer
Enkelte bruer, ev. bruer på enkelte strekninger, kan begrense tillatt hastighet. En oversikt over strekninger hvor bruer ikke er dimensjonert for klasse D2 (EN 15528) er gjengitt her: Bruer og hastigheter
Lokale forhold
I tillegg til de nevnte punktene, kan det være lokale forhold som også legger føringer for tillatt hastighet. En oversikt over slike strekninger ligger i Strekningsbeskrivelse for jernbanenettet under Operativt regelverk (ORV): Togets kjørehastighet. For flere banestrekninger er det en overhengende rasfare. For slike strekninger kan hastigheten være permanent nedsatt, med den hensikt å redusere konsekvensen dersom det skulle ha gått ras (se Hastighet grunnet rasfare). Det kan også være forhold utenom dem nevnt i strekningsbeskrivelsen som påvirker hastigheten. For fullstendig oversikt anbefales det å ta kontakt med områdeansvarlig.
Utjevning av profiler
Dette trinnet innebærer å transformere et hastighetsprofil på elementnivå til et profil som oppleves som logisk av den som skal kjøre etter det. Med andre ord inneholder et slikt profil langt færre hastighetsendringer enn et profil som ikke er utjevnet. Et hastighetsprofil vil stort sett alltid bestå av topper, bunner og trappetrinn (se figur under).

Bunner skyldes gjerne krappe kurver, planoverganger med utilstrekkelig sikt eller lokale forhold. Hvor dette er tilfellet må toget uansett ned i hastighet. Etter at en slik hastighetsbegrensning er passert, vil det være naturlig å tillate hastighetsøkning igjen. Derfor kan bunnene være meget korte linjer i hastighetsprofilet. For toppene er situasjonen en annen. Et hastighetsprofil med korte topper fører til hyppige hastighetsendringer, noe som kan oppleves stressende for lokførerne som skal kjøre etter disse hastighetene. Samtidig er ikke gevinsten like stor av å sette opp hastigheten i det øvrige sjiktet av hastighetsprofilet som i det lavere sjiktet. Eksempelvis vil en økning fra 60 til 80 km/t over 500 meter gi en tidsgevinst på 7.5 sekunder. Til sammenligning gir en økning fra 110 til 130 km/t over samme distanse, en tidsbesparelse på 2.6 sekunder.
Når det gjelder trappetrinnene mellom topper og bunner i profilet, gjelder følgende anbefaling: Det anbefales at lengden på trappetrinnet er tilstrekkelig for at togene rekker å gjennomføre hele akselerasjonen/retardasjonen innenfor dette aktuelle trappetrinnet.
I denne veilederen gis det anbefalinger for hvordan hastighetsprofiler kan jevnes ut for å oppnå et profil der tidsbesparelse og kjørekomfort er godt balansert. Følgelig er det ikke et krav at hastighetene jevnes ut med denne metodikken. I tett trafikkerte områder, der det er ønskelig å utnytte potensialet som ligger i kurvaturen til det ytterste, kan det være hensiktsmessig å tillate kortere topper i hastighetsprofilet enn hva som anbefales her.
Faktorer
Når hastighetsprofilet skal jevnes ut, er det flere faktorer som spiller inn. I en forenklet modell kan det antas at de viktigste parameterne er:
- Hastighet før økning
- Ønsket hastighet
- Hastighet etter økning
- Antatt akselerasjon
- Antatt retardasjon
- Anbefalt tid i konstant hastighet
- Gradient
- (Lengde på tog)
Formler og metodikk
I dette underkapittelet forklares det hva som ligger bak de anbefalte distansene som er oppgitt i ( Lenke til tabeller eller JavaScript her). Det er kun sett på dimensjonering av lengde på topper i hastighetsprofil.
For å komme frem til anbefalt distanse som tillater hastighetsøkning, er det benyttet formler for sammenheng mellom hastighet og distanse, gitt konstant akselerasjon/retardasjon. Konstante verdier for akselerasjon og retardasjon er en tilnærming som gjerne benyttes i forbindelse med beregninger innen jernbanetekniske fag. Blant annet, baserer bremsekurvene som benyttes av ATC-systemet seg på en slik tilnærming (ATC Handbok, BVH 544.30004).
Distansen det tar å akselerere fra en hastighet til en annen med konstant akselerasjon er:
, der
- s er distanse
- er utgangshastighet
- er målhastighet
- a er akselerasjon
Ved å sette en anbefalt minsteverdi for tiden et tog skal holde målhastigheten i en hastighetstopp, er det mulig å regne ut nødvendig distanse:

Siden hastighetsøkning kun tillates når siste del av toget har passert skiltet, vil heller ikke togfront kunne akselerere før en avstand lik togets lengde er tilbakelagt. Dette, i tillegg til sikkerhetsmargin knyttet til nedbremsing, reduserer tiden i hastighetstoppen. Med andre ord vil situasjonen ute i sporet være mer lik hva som er avbildet i figuren under.

, mens
Her er toglengde togets lengde, mens tbbu og tdriver er henholdsvis tilsetningstid for bremser og reaksjonstid for lokfører.
Dersom en velger å se bort ifra stigning/fall i sporet og eventuelt toglengde, kan formlene over benyttes direkte med fornuftige valg av akselerasjon, a, retardasjon, r, og tid i konstant hastighet i profiltopp, t.
Gradientkorreksjon
Stigning og fall ute i sporet vil virke inn på togets akselerasjons- og retardasjonsevne. Fall fører til raskere akselerasjon og tregere oppbremsing, stigning det motsatte. En god tilnærming er å enten legge til eller trekke fra gradienten(i promille)/100, avhengig av om det er stigning eller fall. Deretter benyttes denne korrigerte akselerasjons- og retardasjonsverdien videre i beregningene.
Formelen for korrigert akselerasjon og retardasjon blir:
Feil i matematikken (Konverteringsfeil. Tjeneren («cli») rapporterte: «SyntaxError: Expected "-", "[", "\\", "\\begin", "\\begin{", "]", "^", "_", "{", "}", [ \t\n\r], [%$], [().], [,:;?!'], [/|], [0-9], [><~], [\-+*=], or [a-zA-Z] but "‰" found.in 2:29»): {\displaystyle a_{korrigert} = a - \frac{G[‰]}{100} }
Feil i matematikken (Konverteringsfeil. Tjeneren («cli») rapporterte: «SyntaxError: Expected "-", "[", "\\", "\\begin", "\\begin{", "]", "^", "_", "{", "}", [ \t\n\r], [%$], [().], [,:;?!'], [/|], [0-9], [><~], [\-+*=], or [a-zA-Z] but "‰" found.in 2:29»): {\displaystyle r_{korrigert} = r + \frac{G[‰]}{100} }
OBS: Fall er definert som negativ verdi.
I mange tilfeller vil ikke stigningen eller fallet være identisk over hele strekningen for akselerasjon eller oppbremsing. Det kan da benyttes en gjennomsnittlig verdi som rundes til nærmeste 5 ‰, i den retningen som gir lengst akselerasjons-/bremsesone.
Akselerasjon og retardasjon
Algoritmen presentert her avhenger av akselerasjon og retardasjon. Dette introduserer usikkerhet. For det første er både akselerasjonen og retardasjonen antatt å være tilnærmet konstant. I realiteten er ikke dette helt korrekt, da begge verdier synker med økende hastighet. For det andre er det vanskelig å anslå hvilke akselerasjons- og retardasjonsverdier som best gjenspeiler normal rutekjøring, hvilket vil være det mest naturlige å se på. Dette kan blant annet avhenge av togtype og rutetabeller. Det er en forutsetning at anbefalingene gitt i denne veilederen fører til hastighetsprofiler som oppleves logiske uavhengig av slike forskjeller.

Figuren over illustrerer hvilke akselerasjoner og retardasjoner som kan være med i en modell.
- Maks akselerasjon, togende: Dersom det er ønskelig å justere/ optimalisere plassering av startpunkt for akselerasjon, er det viktig å ha kontroll på maksimal akselerasjon på det raskest akselererende toget som benytter profilet. Konsekvensen av å ikke benytte den absolutt høyeste akselerasjonen, er at toget med raskest akselerasjon vil få tillatelse til å starte akselerasjon for tidlig, og dermed kjøre for fort i forhold til beregnet hastighet. På mange måter kan man si at denne mørkegrønne linjen representerer togets bakende, da hele togets lengde som kjent skal passere punkt for hastighetsøkning før akselerasjon kan initieres.
- Driftsakselerasjon, togfront: Denne linjen illustrerer hvordan et typisk tog som benytter profilet kjører. Punktet der den lysegrønne linjen treffer hastighetsprofilet i ny (forhøyet) hastighet er altså hvor togets front når den nye hastigheten. Denne linjen har ingenting med sikkerhet å gjøre, men benyttes til å bestemme om hastighetstoppen er tilstrekkelig lang til å forsvare akselerasjonen.
- Nødbremseretardasjon, togfront: Dersom det er ønskelig å justere/ optimalisere plassering av startpunkt for retardasjon, er det viktig å ha kontroll på maksimal retardasjon på det toget med kraftigst bremser. Dette av samme grunn som for maksimal akselerasjon.
- Driftsretardasjon, togfront: Denne linjen illustrerer hvordan et typisk tog som benytter profilet kjører. Det er antatt at lokførerne følger ERTMS-bremsekurve "Permitted", altså tillatt hastighet. Denne bremsekurven kommer, som en kan se, ned i hastighet et stykke foran punktet hvor nødbremsekurven ender. Dette skyldes sikkerhetsmarginer i systemet. Linjen har ingenting med sikkerhet å gjøre, men benyttes for å bestemme om hastighetstoppen er tilstrekkelig lang til å forsvare akselerasjonen.
Retardasjon
Her presenteres grunnlag for beregning av retardasjon. Siden ERTMS (European Rail Traffic Management System) tar over stafettpinnen fra ATC (Automatic Train Control), er det ERAs(European Union Agency for Railways) formelverk som er benyttet.
Nødbremsekurve
Når ERTMS-bremsekurvene kalkuleres benyttes det ulike retardasjonsverdier i forskjellige hastighetsintervall. Kurvene får dermed knekkpunkter. Det første av disse knekkpunktene finner en ved hastighet . Denne grenseverdien finnes gjennom den empiriske formelen:
, der er bremseprosent for det aktuelle toget.
For alle hastigheter under denne hastigheten beregnes den konstante nødbremsretardasjonen ved følgende formel:
Hvordan bremseprosenten påvirker Vlim og nødbremseretardasjon er illustrert i følgende tabell:
| Bremseprosent, λ | Vlim [km/t] | Nødbremseretardasjon [m/s2] |
|---|---|---|
| 70 | 103.82 | 0.601 |
| 100 | 120.95 | 0.826 |
| 152 | 144.69 | 1.216 |
Eksempelvis blir Vlim og r for et tog med bremseprosent 152 % henholdsvis 144,69 km/t og 1,216 m/s2.
Når hastigheten overstiger Vlim regnes retardasjonen ut ved hjelp av et tredjegradspolynom med tilhørende inngangsparametere. Hvilke parametere som benyttes avhenger av hastighetsintervall. For mer informasjon, se Subset 26-3, A.3.7 (ETCS Set of Specifications).
Retardasjonen vil uavhengig av intervall ha en lavere verdi enn retardasjon under Vlim. Dette er logisk, da adhesjonen mellom hjul og skinne som kjent svekkes ved høyere hastigheter.
Ved videre beregning av bremsekurver, finnes en verdi for hva som regnes som 'trygg' retardasjon. Her hensyntas stigning/fall, og det er også mulig å legge inn faktorer for forskjellige hastighetsintervaller og toglengder. Faktorene som benyttes for forskjellige land er en del av de nasjonale verdiene som legges inn i systemet. I Norge er disse justert slik at sikkerhetsmarginene ligger i nærheten av hva de gjør med ATC.
Eksempelvis vil trygg retardasjon for et passasjertog med lengde 220 m og bremseprosent 152 under Vlim være
, der 0.7 er hastighetsavhengig korreksjonsfaktor, 1.0 er korreksjonsfaktor for toglengde og 1.216 er nødbremsretardasjonen.
For godstog kompliseres utregningen ytterligere, da det er ulike korreksjonsfaktorer for hastigheter over og under 60 km/t (henholdsvis 0,94 og 0,82).
Ved å benytte høyeste korreksjonsfaktor blir trygg retardasjon for godstog med P-brems under Vlim
Servicebremse/ normal nedbremsing
Når en skal vurdere hvor normal nedbremsing begynner ved bruk av ERTMS, er det naturlig å anta at lokførerne forsøker å følge ERTMS' Permitted-kurve så godt det lar seg gjøre. Avstanden fra Permitted-kurven til nødbremsekurven avhenger av flere parametere, blant annet sikkerhetsfaktorer, toglengde, hva slags type tog det er snakk om, bremsgruppe og lokførers reaksjonstid (satt verdi). Den vil også avhenge av baliseplassering (posisjonsusikkerhet).
Å finne den eksakte avstanden er temmelig komplisert (for fullstendig forklaring, henvises det til se Subset 26-3 ETCS Set of Specifications), men siden motivasjonen for å finne dette punktet er å sikre lokførers kjørekomfort (går ikke ut over sikkerhet), kan det tillates å foreta noen forenklinger.
Figuren under viser plasseringen av de forskjellige bremsekurvene i forhold til hverandre.

Ved å gjøre noen forenklinger, kan en si at avstanden mellom Permitted-kurven og EBD-kurven (Emergency Brake Deceleration) er tilnærmet lik
Punktet hvor Permitted-kurven begynner ligger et gitt antall sekunder foran start på nødbremsekurve. Mens Tdriver er en konstant verdi som ligger inne i systemet, er ekvivalent tilsetningstid for nødbrems, tbe, en parameter som avhenger av sikkerhetsfaktorer, toglengde, togtype og bremsegruppe. Først finnes tilsetningstid fra følgende formel (se Subset 26-3 for ytterligere forklaringer):
Avhengig av toglengde, togtype og bremsegruppe benyttes det forskjellige verdier for a, b, c og L'. Noen eksempler er vist i tabell under.
| Togtype | Bremsegruppe | Lengde [m] | a | b | c | L' | Tilsetningstid [s] |
|---|---|---|---|---|---|---|---|
| Passasjer | P | 220 | 2.3 | 0.0 | 0.17 | 400 | 5.02 |
| Gods | P | 400 | 2.3 | 0.0 | 0.17 | 400 | 5.02 |
| Gods | P | 700 | 2.3 | 0.0 | 0.17 | 700 | 10.63 |
| Gods | G | 400 | 12 | 0.0 | 0.05 | 400 | 12.80 |
| Gods | G | 700 | 12 | 0.0 | 0.05 | 700 | 14.45 |
Endelig tilsetningstid oppnås ved å introdusere de to korreksjonsfaktorene Kt_int og Kto. Førsnevnte er en del av nasjonale verdier og kan således endres, mens sistnevnte er systembestemt (1.16 for godstog med "G"-brems, ellers 1.2).
| Togtype | Bremsegruppe | Lengde [m] | Kto | Kt_int | t_be |
|---|---|---|---|---|---|
| Passasjer | P | 220 | 1.2 | 1.3 | 7.83 |
| Gods | P | 400 | 1.2 | 1.3 | 7.83 |
| Gods | P | 700 | 1.2 | 1.3 | 16.58 |
| Gods | G | 400 | 1.16 | 1.3 | 19.30 |
| Gods | G | 700 | 1.16 | 1.3 | 21.79 |
Ved å legge til sekunder tilsvarende parameteren Tdriver, ender en opp med et estimat på hvor langt foran nødbremsekurve Permitted-kurven begynner. For et passasjertog på 220 m med bremseprosent 152 blir dette omtrent 12 sekunder. I en modell kan startpunktet for Permitted-kurven nå tilnærmes ved å multiplisere hastigheten med denne tiden, og trekke denne distansen fra startpunkt for den modellerte EBD-kurven. Dette er gjort i figuren under, der det også kommer tydelig fram at modellen klarer å tilnærme startpunkt for Permitted-kurven med god nøyaktighet.

Ved økende hastigheter over Vlim vil en se en proporsjonalt økende avstand mellom modellert punkt og reelt punkt. Dette skyldes som nevnt tidligere at retardasjonen tilnærmes til en konstant verdi uavhengig av hastighet, mens den i realiteten avtar noe ved høyere hastigheter. Dette bør allikevel ikke være problematisk, all den tid hastigheten på de strekningene med hyppige hastighetsendringer stort sett ligger under Vlim. På nyere strekninger blir ikke dette punktet like relevant, da de gjerne prosjekteres slik at hastigheten kan opprettholdes over en lengre strekning.
Akselerasjon
Som for retardasjonen er det av interesse å se på to forskjellige akselerasjonskurver, én som modellerer maksimal akselerasjon (knyttet til sikkerhet) og én knyttet til typisk akselerasjon (knyttet til kjørekomfort). Akselerasjon kan ikke foretas uten at hele togets lengde har passert punktet for hastighetsøkning. Derfor kan en si at den førstnevnte kurven følger togets bakende mens den sistnevnte følger togets front.
Maksimal akselerasjon
Når startpunkt for hastighetsøkning skal justeres, analogt med for retardasjon, er det kurven for maksimal akselerasjon som benyttes. Det er dermed viktig at ingen av togene som trafikkerer strekningen har en raskere akselerasjon enn den som benyttes her.
Maksimal akselerasjon for de vanligste passasjertogene er vist i tabell ?.
For godstog avhenger akselerasjonen av hvordan toget er satt sammen. Det kan være verdt å huske på at f.eks. løslok også kan kjøre på godsprofil, og at disse har en meget rask teoretisk akselerasjon.
| Togtype | Egenvekt [tonn] | Maksimal trekkraft [kN] | Faktor for roterende masse | Maks akselerasjon [m/s2] | Bremseprosent [%] |
|---|---|---|---|---|---|
| Type 72 | 164 | 186 | 1.05 | 1.08 | 151 |
| Type 73 | 234 | 117 | 1.05 | 0.48 | 160 |
| Type 74 | 218 | 240 | 1.05 | 1.05 | 152 |
| Type 75 | 218 | 240 | 1.05 | 1.05 | 152 |
| Type 93 | 84 | 90 | 1.05 | 1.02 | 155 |
| EL18 + 9 x B7 | 457 | 275 | 1.05 | 0.57 | 155 |
OBS: Akselerasjon over kort tid kan overstige denne verdien. F.eks. Flirt -> 1.4 m/s2
Typisk akselerasjon
Den typiske akselerasjonen benyttes til å estimere hvor lang tid lokfører får per hastighetssegment. Siden det vil være flere togtyper som kjører på samme profil, vil det være individuelle forskjeller i akselerasjon disse imellom. Allikevel kan det benyttes én akselerasjonsverdi per hastighetsprofil, som da vil gjenspeile et dimensjonerende togs antatte akselerasjon.

Da denne akselerasjonsverdien brukes i estimering av kjøretid i hastighetstopp, vil det si at raskere tog (enn dimensjonerende) vil få mer tid i konstant hastighet, mens tregere tog opplever det motsatte.
Perfekt for alle tog vil aldri profilene bli, men målet er å ende opp med et godt kompromiss.
Det er viktig å være klar over at konstant akselerasjon er en tilnærming. I realiteten avtar akselerasjonen med økende hastighet. Dette skyldes avtagende adhesjon med tilhørende reduksjon i trekkraft. En mer realistisk tilnærming vil være å benytte faktiske trekkraftdiagrammer. Dette er diagrammer som viser sammenhengen mellom hastighet og trekkraft (se under). Som en kan se, avtar akselerasjonen med økende hastighet, og det vil altså være stor forskjell på akselerasjonen fra f.eks. 0 til 40 km/t kontra 160 til 200 km/t. Ser en på et Flirt-tog som følger maks-kurven i trekkraftdiagrammet, vil gjennomsnittlig akselerasjon for disse to hastighetsøkningene være ca. 0.95 m/s2 og 0.35 m/s2(!). En modellert konstant akselerasjon vil altså ikke være en god tilnærming over hele hastighetsintervallet. Siden de fleste norske banestrekninger har en kurvatur som ikke tillater veldig høye hastigheter, vil det være fornuftig å benytte en modellert akselerasjon som er gjeldende for lavere hastigheter (under 130 km/t).

Anbefalte parameterverdier
Anbefalte verdier for forskjellige togkategorier er presentert i tabell under:
| Togkategori | Høyeste bremseprosent [%] | V_lim [km/t] | Maks retardasjon [m/s2] | Dimensjonerende toglengde [m] | Tilsetningstid + T_driver [sek] | Maks akselerasjon [m/s2] | Typisk akselerasjon [m/s2] |
|---|---|---|---|---|---|---|---|
| Konvensjonelt materiell | 100 | 120.95 | 0.7 | 400 | 23 | 2.0 | 0.5 |
| Plussmateriell | 160 | 147.9 | 0.9 | 220 | 12 | 2.0 | 0.9 |
| Krengetog | 160 | 147.9 | 0.9 | 220 | 12 | 2.0 | 0.9 |
For å beregne nødvendig distanse for å tillate en gitt hastighet, trengs det også et tidskriterium: et minstekrav til tid et tog må kjøre i konstant hastighet.
Forslag til verdier er gitt under:
| Togkategori | Minstetid i hastighetstopp [s] |
|---|---|
| Konvensjonelt materiell | 40 |
| Plussmateriell | 30 |
| Krengetog | 30 |
I prosessen med å utarbeide hastighetsprofiler, har ikke optimalisering av plassering av hastighetsøkning/-nedsettelse blitt benyttet. Dels fordi det er mer intuitivt å forholde seg til hastighetsprofiler der endring av hastighet skjer på samme kilometer. Dette er ofte ikke tilfellet når plasseringen optimaliseres. Den andre grunnen er at det er utfordrende å være sikker på hvilke verdier for akselerasjon og retardasjon som skal benyttes. Hadde det kun vært snakk om én type tog innenfor samme profil, hadde oppgaven vært langt enklere. Høye verdier av akselerasjon gir uansett mindre besparelser, og derfor er det vurdert som mye jobb for lite besparelse.
Det er allikevel tatt med her for å vise at det er mulig å spare noe tid.
Optimalisering forklart
Når hastighetsprofil jevnes ut, kan det ofte være noe tid å hente på å justere punkt for hastighetsøkning og -reduksjon. Poenget her er å flytte punktet slik at et tog med den retardasjonen eller akselerasjonen som er antatt, akkurat overholder beregnet hastighet. Dette er illustrert i figuren under, der en kan se at en flytting av punkt gir en viss besparelse i tid. Av formelen for spart tid ser en at besparelsen avhenger av differansen mellom de to hastighetene. Dette er logisk, da man på sett og vis flytter avstanden Δx fra den lave hastigheten til den høye.


Et annet eksempel som endrer plassering av hastighetsøkning er vist under. Legg merke til at desto lavere akselerasjonen for det tenkte toget er, desto lengre kan startpunktet flyttes.

Lav akselerasjon

Middels akselerasjon

Høy akselerasjon
Uendelig akselerasjon




Slike justeringer fordrer at realistiske retardasjonsverdier benyttes, og disse bør være konservative. Konsekvensen av å benytte for lave verdier for retardasjon er at sluttpunktet plasseres for langt inn i en kurve (eller annen hastighetsbegrensning), og i verste fall vil togets hastighet kunne overskride beregnet hastighet med mer enn hva systemets marginer tillater.
Slik systemet er designet, ligger det inne marginer som gjelder for de forskjellige bremsekurvene. "Emergency Brake Deceleration"(EBD)-kurven i ERTMS går ikke ned til målhastighet, men til V = målhastighet + dV_ebi_min (for hastigheter under fastsatt verdi V_ebi_min). For hastigheter under 110 km/t vil denne marginen være på 7.5 km/t. Med andre ord kan et tog entre en hastighetsbegrensning i opptil 7.5 km/t over tillatt hastighet. Dette vil kunne oppleves ubehagelig for passasjerer i og med at komfortparameterne i Teknisk regelverk overskrides. Det vil også være mulig å ligge konstant i 7 km/t over tillatt hastighet uten at dette utløser nødbrems (dette vil trigge lys- og lydvarsel).

Ved å tilpasse hastighetsprofilene ved hjelp av trygg retardasjonsverdi sikres det at tog (med samme bremseprosent) maksimalt holder 7.5 km/t over tillatt hastighet dersom terskelhastighet for nødbremseinngrep overskrides. Som nevnt, gjelder den trygge retardasjonen opp til en viss hastighet (144 km/t for bremseprosent på 152). Når hastigheten er høyere enn denne terskelhastigheten, avtar retardasjonsverdien. Det vil altså være en konservativ tilnærming å benytte den trygge retardasjonen som gjelder opp til terskelhastighet for hele hastighetsintervallet, uavhengig av om hastigheten faktisk er høyere. Det vil altså være noe uutnyttet potensial i profiler med høye hastigheter. Med tanke på hvor mye mer krevende slike beregninger vil være, er det nok allikevel en god løsning å benytte samme retardasjonsverdi for alle hastigheter.
I figuren under viser det skraverte grønne feltet forskjellen mellom reell retardasjon og konstant retardasjon satt lik verdi gjeldende for .

Dagens situasjon
Dersom man benytter metodologi som beskrevet her, ser en at flere av dagens hastighetsprofiler er satt langt mer aggressivt. Det er altså forventet at lokfører i stor grad skal utnytte potensialet i traseen fullt ut.
En kan alltids spørre seg om hvorvidt slike hastighetsprofiler fører til økt stressnivå for førerne, eller om det elegant løses ved å se på skiltingen langs sporet som veiledende.
Figuren under viser et eksempel hentet fra Gjøvikbanen, retning Gjøvik, og illustrerer hvor mye tid en lokfører anslagsvis får i konstant hastighet før bremsefasen initieres (godsprofil). Den korte tiden for flere av disse hastighetstoppene kan medføre et økt stressnivå for lokfører.
I dette eksempelet er også hastigheten i enkelte kurver for høy i forhold til beregnet hastighet basert på parametere i Teknisk regelverk. Dette kan skyldes at hastighetene ikke er oppdatert etter skjerping av kravene i regelverket.

|
Formel
(Javascript) sett inn formel på formen: Lenke til formel
Får ikke lagt inn lenke til riktig formel her ennå, mulig å fikse hvis dette er noe å gå videre med. Ser sånn ut:
